
:)
Object Detection 본문
Object classification : What is the object in an image
Object localization : What and where is the "single" object in an image
Object detection : What and where is the "multiple" object in an image
Classification
Classifier -> output : class_score [K, N]
K : The number of predicted objects
N : The number of class
Object localization
Regressor -> output : [K + 4]
X, Y, W, H : bounding box에 대한 정보를 담은 4개의 포인터 값

- Multiple object localization
- 이미지 안에서 작은 패치 이미지를 보고 패치를 이동해가면서 클래스와 위치 정보를 bounding box로 아웃풋을 냄.
- Overfeat paper(패치를 여러 개 보면서 많은 연산을 가지는 게 단점)

- Object detection은 마지막 layer에서 fully connected layer가 아닌 2d feature map으로 나타남.
- classification의 마지막 layer는 1D 형식을 갖기 때문에 위치 정보가 없음.

One stage Object detector architecture

Backbone
- feature extractor(이미지의 특징점들을 뽑아내면서 추상화)
Neck
- Merge the different resolution feature maps
Dense Prediction
- Predict score of object and bounding box
- Regression layers
Tow stage Object detector architecture

- 정확도는 좋지만 높은 computation cost
객체가 검출되는 방법
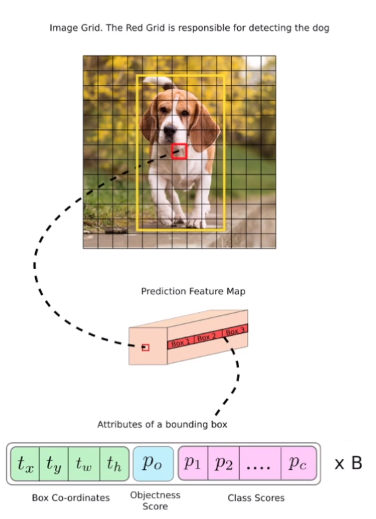
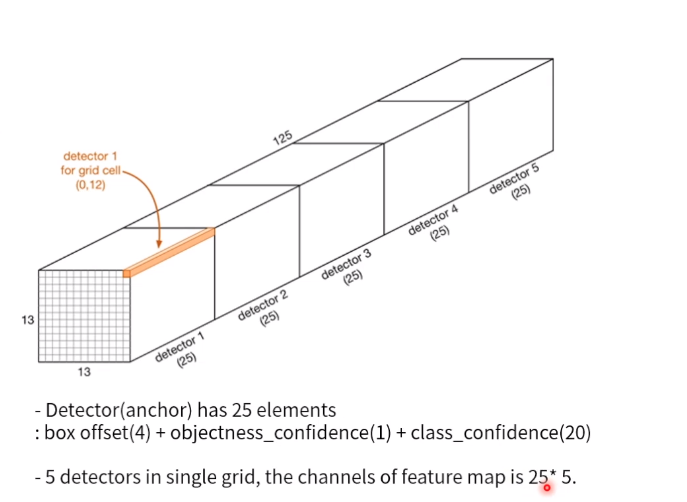
Grid
- feature 맵의 pixel 수
- predict the objects in each grid cell
Anchor
- The detector which is predict single bounding box
- Predict one object per anchor
- Pre-defined bounding box shape




Object detection models
One stage object detectors

Two stage object detecors



Evaluation metric
Precision(정밀도) = tp / (tp + fp)
Recall(재현율) = tp / (tp + fn)
TP(True positive) : 옳은 검출
FP(Flase Positive) : 틀린 검출
FN(False Negative) : 검출되었어야 하는데 검출 안됨
TN(True Negative) : 검출되지 않아야 하는 것이 검출 안됨

F1 score로 모델 평가를 많이 함.
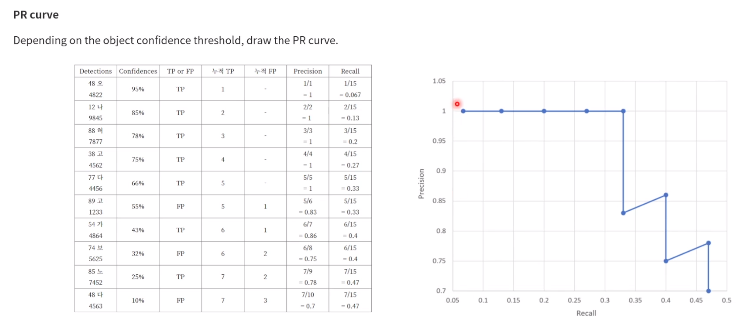
mAP : Mean average precision, PR curve area(적분한 값)

클래스간 간섭이 얼마나 있냐를 볼 수 있음.
'AI' 카테고리의 다른 글
| Perception 기술 분류 (0) | 2022.05.02 |
|---|---|
| YOLOv3 시작하기 (0) | 2022.05.02 |
| CNN - Training (0) | 2022.04.29 |
| CNN (0) | 2022.04.26 |
| 정보이론 (0) | 2022.04.15 |



